Project VRS (VR Spacecraft Simulator)
An independent project where I focused on developing advanced VR systems and engaging gameplay mechanics for a spacecraft simulator.
Project Overview & Features
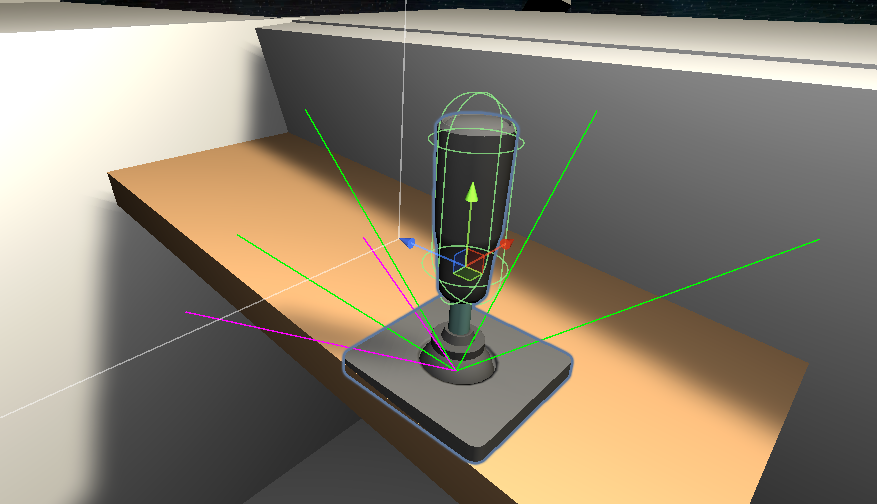
- Developed an immersive flight control system for VR spacecraft with comprehensive dual-joystick functionality.
- Implemented real-time management of subsystems like targeting and power delivery.
- Collaborated on a physics-simulated flight system with 3D controls for enhanced realism.
- Designed and implemented dynamic combat environments with waves of enemies, customizable missions, and unique factions.
- Integrated positional tracking turrets and missiles for improved accuracy and interactivity.
Skills & Technologies Applied
Learning & Growth
This project was a significant learning experience, allowing me to dive deep into complex game systems and VR interactions. It honed my problem-solving skills and my ability to work with advanced Unity features and mathematical concepts crucial for realistic simulations.
Visuals & Code Snippets
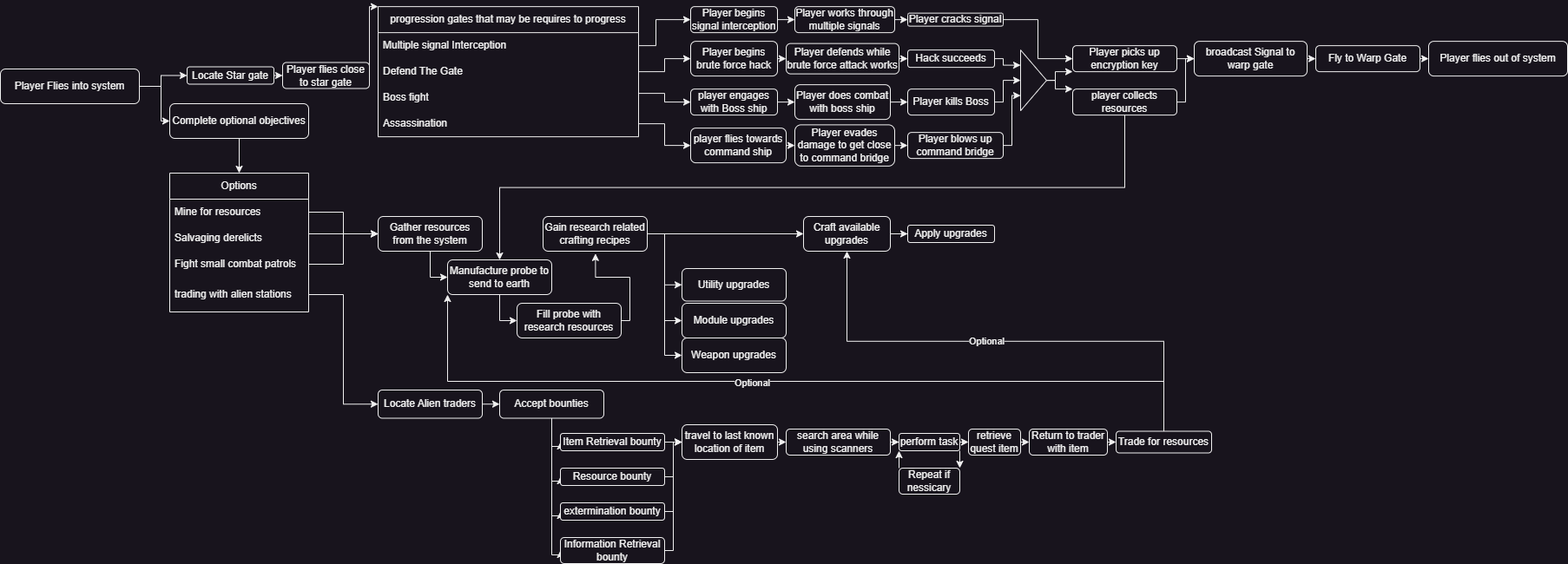
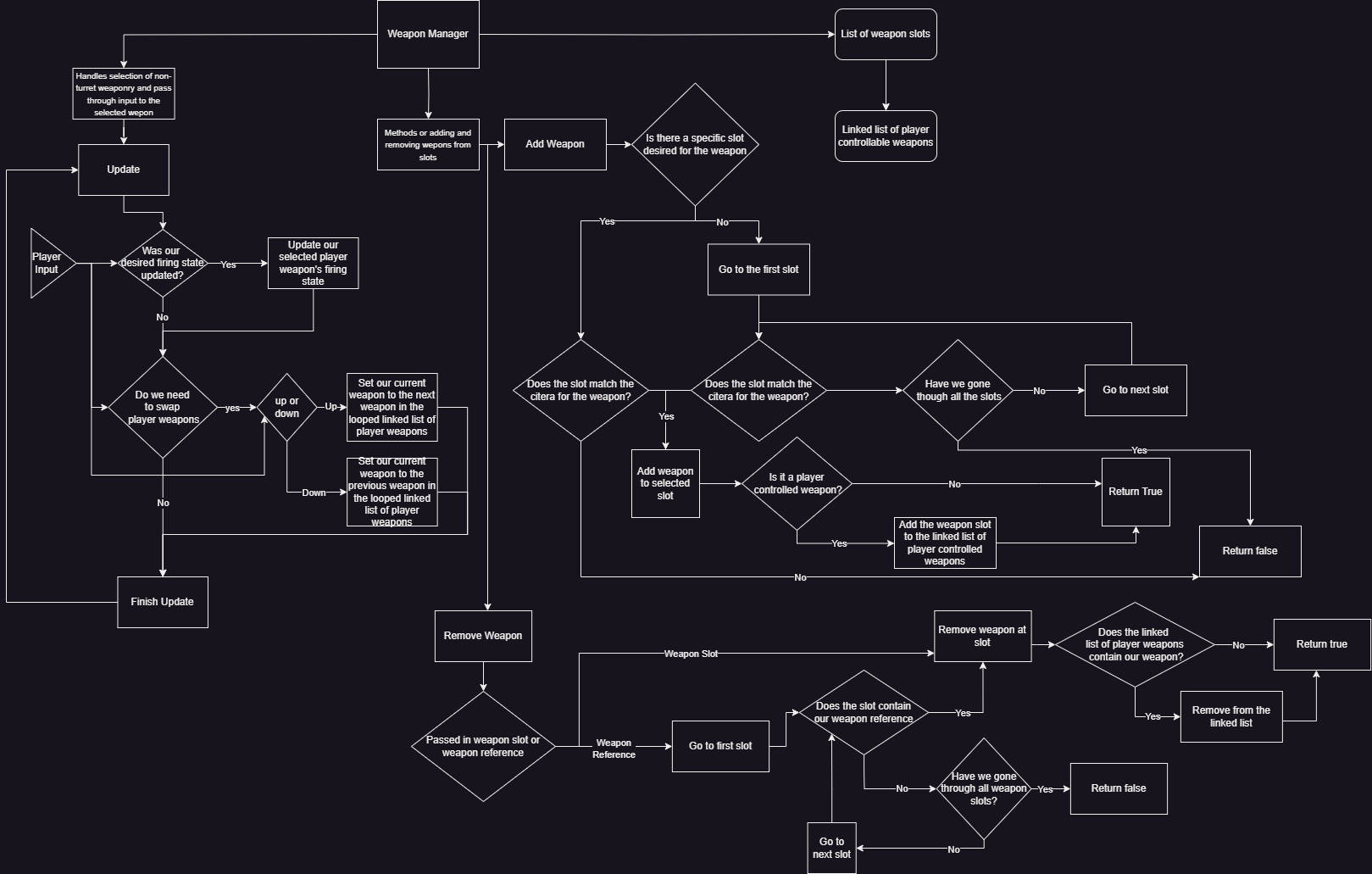
A collection of screenshots showcasing the VR joystick, development progression, and the weapon manager interface within Project VRS. Scroll to view all images.
Code Snippet: VR Flight Movement Code
public class IM_ShipMovementController : BC_ShipMovementController
{
//magic numbers for remapping the vector inputs
const float m_lowerJoystickInputBounds = -1f;
const float m_upperJoystickInputBounds = 1f;
//continously applied vectors that change upon setting values for the inputs
protected Vector3 m_savedForwardVector;
protected Vector3 m_savedPitchAxis;
protected float m_savedPitchSpeed;
protected Vector3 m_savedRollAxis;
protected float m_savedRollSpeed;
protected Vector3 m_savedStrafeVector;
protected Vector3 m_savedYawAxis;
protected float m_savedYawSpeed;
protected bool m_toggleYawForStrafe;
protected float m_brakingForce;
protected virtual void FixedUpdate()
{
//this will apply all current inputs
ApplyAllCurrentForces();
}
private void ApplyAllCurrentForces()
{
//linear motion
ApplyLinearMotionValue(m_savedForwardVector);
//roll and pitch rotations
ApplyRotationOnAxis(m_savedPitchAxis, m_savedPitchSpeed);
ApplyRotationOnAxis(m_savedRollAxis, m_savedRollSpeed);
//apply strafe movement
ApplyStrafe(m_savedStrafeVector);
//yaw rotations
ApplyRotationOnAxis(m_savedYawAxis, m_savedYawSpeed);
//finally, prevent the speed from breaching the speed cap
ClampVelocityToMaxSpeed();
}
protected void SaveNewLinearMotionVector(float rawThrottleInput)
{
//remap the joystick value
float appliedThrustValue = ExtensionMethods.Remap(rawThrottleInput, // Value to modify
m_lowerJoystickInputBounds, // Lower original bound
m_upperJoystickInputBounds, // Upper original bound
m_maxDeceleration, // Lower new bound
m_maxAcceleration); // Upper new bound
//create a forward vector of the speed we want to move
Vector3 forwardVector = new Vector3(0f, 0f, appliedThrustValue);
//save the value
m_savedForwardVector = forwardVector;
}
protected void SaveNewRotationOnAxis(ShipJoystickInput currentInput)
{
//ADD-RELATIVE-TORQUE ROTATES THE BODY CLOCKWISE AROUND THE AXIS (if it is counter clockwise your visualization is upside down)
//remap the joystick values
float newPitchRotationSpeed = currentInput.PrimaryFlightStick.y * m_maxRateOfPitch;
float newRollRotationSpeed = currentInput.PrimaryFlightStick.x * m_maxRateOfRoll;
float newYawRotationSpeed = currentInput.PrimaryYawValue * m_maxRateOfYaw;
//since the axis is a normalized vector we can just multiply it to get our torque value
Vector3 pitchTorqueVector = ReturnTorqueVector(newPitchRotationSpeed, Vector3.left);
Vector3 pitchAxisWithMappedSpeed = -pitchTorqueVector * Mathf.Abs(newPitchRotationSpeed);
Vector3 rollTorqueVector = ReturnTorqueVector(newRollRotationSpeed, Vector3.forward);
Vector3 rollAxisWithMappedSpeed = -rollTorqueVector * Mathf.Abs(newRollRotationSpeed);
//Yaw ONLY
//determine the direction based on the torque roation
Vector3 yawTorqueVector = ReturnTorqueVector(currentInput.PrimaryYawValue, Vector3.up);
//set the vector to be the speed of the rotation
Vector3 yawAxisWithMappedSpeed = yawTorqueVector * Mathf.Abs(newYawRotationSpeed);
//Saving
//save Pitch
m_savedPitchAxis = pitchAxisWithMappedSpeed;
m_savedPitchSpeed = newPitchRotationSpeed;
// and roll
m_savedRollAxis = rollAxisWithMappedSpeed;
m_savedRollSpeed = newRollRotationSpeed;
//save yaw
m_savedYawAxis = yawAxisWithMappedSpeed;
m_savedYawSpeed = newYawRotationSpeed;
}
protected void SaveNewStrafeVector(float rawYawInput)
{
//remap the joystick value
float appliedYawValue = ExtensionMethods.Remap(rawYawInput, // Value to modify
m_lowerJoystickInputBounds, // Lower original bound
m_upperJoystickInputBounds, // Upper original bound
-m_maxStrafeSpeed, // Lower new bound
m_maxStrafeSpeed); // Upper new bound
//set the vector for the strafe to the speed of the strafe value
Vector3 strafeVector = new Vector3(appliedYawValue, 0f, 0f);
//save the values
m_savedStrafeVector = strafeVector;
}
protected Vector3 ReturnTorqueVector(float input, Vector3 AxiOfRotation)
{
if (input > 0f)
{
return AxiOfRotation;
}
else if (input < 0f)
{
return -AxiOfRotation;
}
else return Vector3.zero;
}
}
This is part of the code that handles tranaslations from virtual joysticks to Ship movement and rotation. It highlights the precise handling of player inputs and their translation into dynamic ship movements within the physics-driven environment.
Code Snippet: Ship Module State Management
IEnumerator StartUpRoutine()
{
//do any logic before the module turns on
PreStartUpLogic();
//set as preparing for both the core module state and the operational state
m_operationalState = ICoreModule.ModuleOperationalState.Preparing;
OnModuleOperationalStateChange.Invoke(m_operationalState, this, ICoreModule.ModuleStateChangeType.OperationalState);
m_coreState = ICoreModule.CoreModuleState.Disabled;
OnCoreModuleStateChange.Invoke(m_coreState, this, ICoreModule.ModuleStateChangeType.CoreState);
//wait
yield return new WaitForSeconds(m_startUpDelay);
//do post start up logic
PostStartUpLogic();
m_coreState = ICoreModule.CoreModuleState.Operational;
OnCoreModuleStateChange.Invoke(m_coreState, this, ICoreModule.ModuleStateChangeType.CoreState);
m_operationalState = ICoreModule.ModuleOperationalState.Active;
OnModuleOperationalStateChange.Invoke(m_operationalState, this, ICoreModule.ModuleStateChangeType.OperationalState);
}
IEnumerator ShutDownRoutine(bool isRebooting)
{
//logic before the shut down
PreShutDownLogic();
//set as preparing for both the core module state and the operational state
m_operationalState = ICoreModule.ModuleOperationalState.Preparing;
OnModuleOperationalStateChange.Invoke(m_operationalState, this, ICoreModule.ModuleStateChangeType.OperationalState);
m_coreState = ICoreModule.CoreModuleState.Standby;
OnCoreModuleStateChange.Invoke(m_coreState, this, ICoreModule.ModuleStateChangeType.CoreState);
//wait
yield return new WaitForSeconds(m_shutDownDelay);
//call post process logic
PostShutDownLogic();
m_coreState = ICoreModule.CoreModuleState.Disabled;
OnCoreModuleStateChange.Invoke(m_coreState, this, ICoreModule.ModuleStateChangeType.CoreState);
//reboot notifiers
if (isRebooting)
{
m_operationalState = ICoreModule.ModuleOperationalState.Rebooting;
OnModuleOperationalStateChange.Invoke(m_operationalState, this, ICoreModule.ModuleStateChangeType.OperationalState);
}
}
IEnumerator RebootRoutine()
{
//shutdowm then start up
StartCoroutine(ShutDownRoutine(true));
yield return new WaitForSeconds(m_rebootDelay);
StartCoroutine(StartUpRoutine());
}
This code snippet illustrates the event-driven state management for a ship module within Project VRS. It defines coroutines for handling the module's startup, shutdown, and reboot sequences, including delays and notifications for state changes, crucial for managing complex ship systems.